- CANwise
- Библиотека CHAI (драйверы устройств)
- Библиотека CANopen
- CANopen DLL мастер
- CAN инструментарий
- Программа моделирования шины CAN
- Скачать программы Бесплатно
- Инструкция по установке CANopen библиотеки для ОС Windows и Linux
- Инструкция по установке программы CANopen для ARM микроконтроллеров серии STM32
- Информация о стоимости
- Информация по эксплуатации CANopen библиотеки для ОС Windows
- Информация по эксплуатации CANopen для ARM микроконтроллеров серии STM32
- Функциональные характеристики CANopen библиотеки
- Функциональные характеристики CANopen для STM32
(495) 988-2726
Навигация |
Программа моделирования шины CANИзучение и анализ CAN сигналов
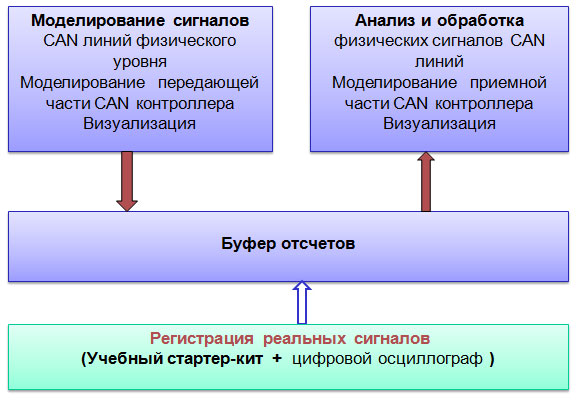
Структура программы
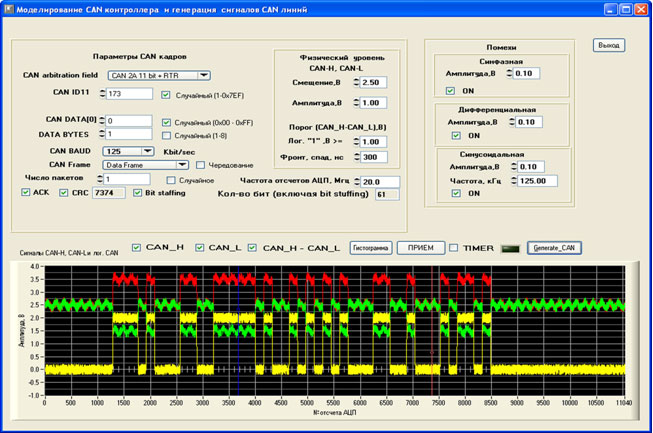
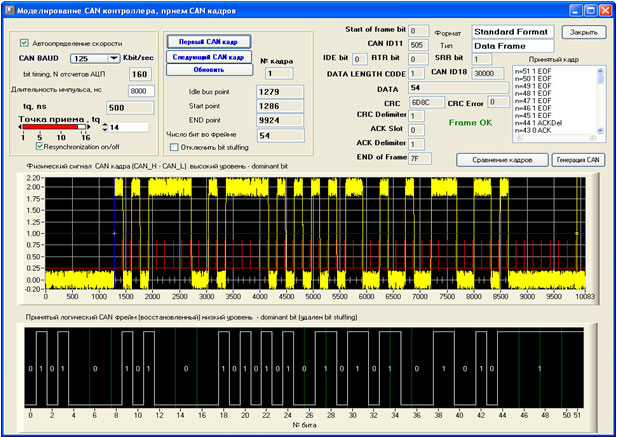
Параметры моделируемого CAN контроллера
Параметры моделируемых физических сигналов
Визуализация сигналов и CAN кадров
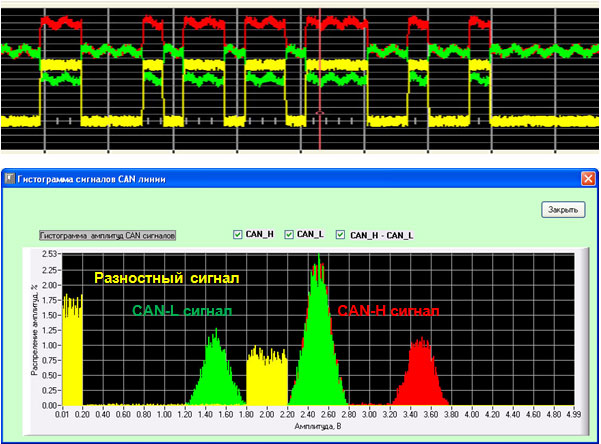
Сигнал и гистограмма: низкий уровень помех
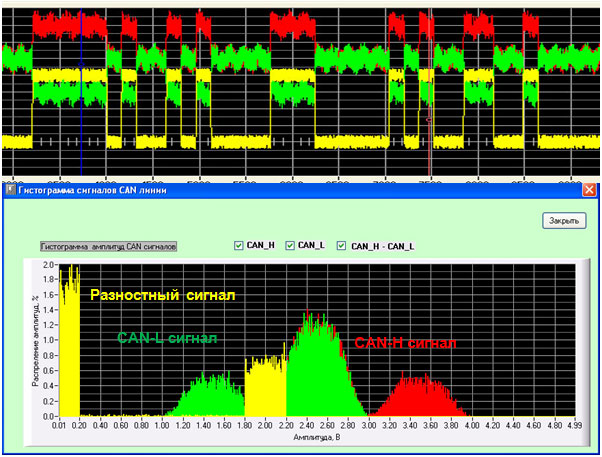
Сигнал и гистограмма: средний уровень помех
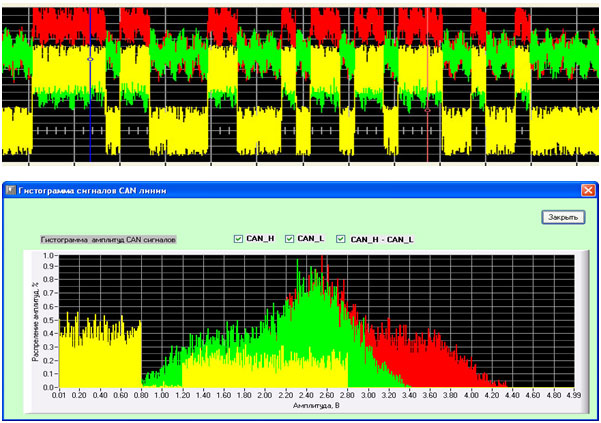
Сигнал и гистограмма: высокий уровень помех
Анализ и обработка CAN сигналов
|
© ООО
Все права защищены.
Марафон, 2006-2026.
Все права защищены.